Appearance
叠帧优化
为了提高对静态物的标注效率,对叠帧算法进行更新。经过叠帧算法计算的静态物位置,标准员无需做任何修改。
前端交互优化
- Before: 叠帧1.0, 先对点云进行叠帧,再将在叠帧点云上绘制的框体映射到每一帧。
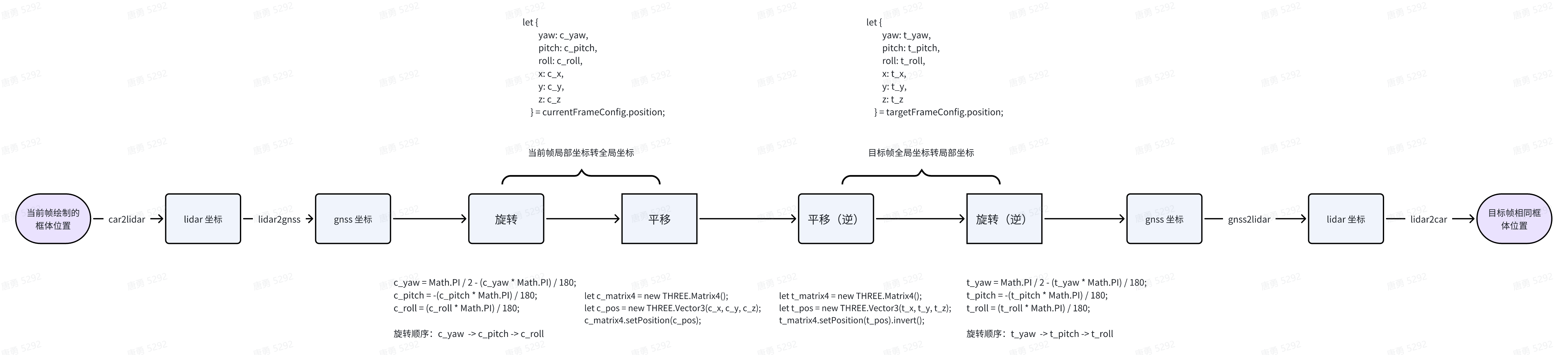
- After: 叠帧2.0, 无需对点云进行叠帧,直接根据当前帧点云绘制的框体位置计算其他帧框体位置。
关于矩阵
矩阵转换之左乘
C * B * A * POINT => 对 POINT 依次进行 A B C 矩阵左乘变换
js
POINT.clone().multiply(A).multiply(B).multiply(C)矩阵的逆矩阵
matrix.clone().invert(), 逆向变换:局部坐标转全局坐标 与 全局坐标转局部坐标
矩阵的转置
matrix.clone().invert(), 使用一维数组和二维数组表示矩阵的时候,得到矩阵可能存在一个转置的关系
叠帧算法
叠帧算法最核心的地方就是对参数的理解
点云所在的坐标系是自车的坐标系
位姿信息的坐标系是 gnss 的坐标系
旋转的顺序:yaw -> pitch -> roll
局部坐标转全局坐标是:先旋转后平移
第一帧局部坐标转全局坐标计算顺序:global = T * R * gnss2lidar_i * lidar2car_i * point1
第二帧全局坐标转局部坐标计算顺序:point2 = lidar2car * gnss2lidar * R_i * T_i * global
算法一:合并转换矩阵
js
/**
*
* @param pos 当前帧位置信息 vector3
* @param currentFrameConfig 当前帧自车位置信息
* @param targetFrameConfig 目标帧自车位置信息
*/
export function positionMapping(
pos: THREE.Vector3 | THREE.Vector3[],
currentFrameConfig: PositionInfoType,
targetFrameConfig: PositionInfoType,
) {
if (!pos || !currentFrameConfig || !targetFrameConfig) return false;
pos = Array.isArray(pos) ? pos : [pos];
function overlapP2P(point: THREE.Vector3, currentFrameConfig: PositionInfoType, targetFrameConfig: PositionInfoType) {
const gnss2lidarArr = [
[
-0.026109514521249981,
0.99965286595866976,
-0.0036201203852738446,
-0.047121363808201665
],
[
-0.99957277620278817,
-0.026059425187690454,
0.013241260141465558,
-0.037917682102624306
],
[
0.013142390807446535,
0.0039642986731841176,
0.99990538314506994,
-0.16919957365882846
],
[
0,
0,
0,
1
]
];
const gnss2lidar = currentFrameConfig.gnss2lidar ? currentFrameConfig.gnss2lidar : gnss2lidarArr;
const lidar2car = currentFrameConfig.lidar2car;
const gnss2lidarMat = new THREE.Matrix4().fromArray(gnss2lidar.flat()).transpose();
const lidar2carMat = new THREE.Matrix4().fromArray(lidar2car.flat()).transpose();
const gnss2car = new THREE.Matrix4().multiplyMatrices(lidar2carMat, gnss2lidarMat);
// Helper: Create a 4x4 transformation matrix from position (XYZRPY)
function createTransformMatrix(position) {
const degToRad = Math.PI / 180;
const roll = position.roll * degToRad;
const pitch = -position.pitch * degToRad;
const yaw = (90 - position.yaw) * degToRad;
console.log({ roll, pitch, yaw });
// Create transformation matrix
const matrix = new THREE.Matrix4();
matrix.makeRotationFromEuler(new THREE.Euler(roll, pitch, yaw, 'ZYX'));
// matrix.makeRotationFromQuaternion(rotationQuaternion);
matrix.setPosition(new THREE.Vector3(position.x, position.y, position.z));
return matrix;
}
// Generate transformation matrices for position1 and position2
const T1 = createTransformMatrix(currentFrameConfig.position);
const T2 = createTransformMatrix(targetFrameConfig.position);
// Invert GNSS to Car matrix
const gnss2carInv = new THREE.Matrix4().copy(gnss2car).invert();
// Compute T1 in world coordinates
const transformT1 = new THREE.Matrix4().multiplyMatrices(T1, gnss2carInv);
// Point in T1 frame
const pose1 = new THREE.Vector4(point.x, point.y, point.z, 1);
const pointWorld = pose1.clone().applyMatrix4(transformT1);
// Compute T2 in world coordinates
const transformT2 = new THREE.Matrix4().multiplyMatrices(T2, gnss2carInv);
const transformT2Inv = new THREE.Matrix4().copy(transformT2).invert();
// Transform point from world to T2 frame
const pose2 = pointWorld.clone().applyMatrix4(transformT2Inv);
// return [pointT2.x, pointT2.y, pointT2.z];
return new THREE.Vector3(pose2.x, pose2.y, pose2.z);
}
return pos.map((p) => overlapP2P(p, currentFrameConfig, targetFrameConfig));
}
/**
*
* @param rotateion euler
* @param currentFrameConfig 当前帧自车位置信息
* @param targetFrameConfig 目标帧自车位置信息
*/
export function rotationMapping(
rotateion: THREE.Euler,
currentFrameConfig: PositionInfoType,
targetFrameConfig: PositionInfoType,
) {
if (!rotateion || !currentFrameConfig || !targetFrameConfig) return false;
let { yaw: c_yaw, pitch: c_pitch, roll: c_roll } = currentFrameConfig.position;
let { yaw: t_yaw, pitch: t_pitch, roll: t_roll } = targetFrameConfig.position;
let newRotation = rotateion.clone();
c_yaw = (c_yaw * Math.PI) / 180;
c_pitch = (c_pitch * Math.PI) / 180;
c_roll = (c_roll * Math.PI) / 180;
t_yaw = (t_yaw * Math.PI) / 180;
t_pitch = (t_pitch * Math.PI) / 180;
t_roll = (t_roll * Math.PI) / 180;
newRotation.set(rotateion.x + t_roll - c_roll, rotateion.y + t_pitch - c_pitch, rotateion.z + t_yaw - c_yaw);
return newRotation;
}算法二: 逐步拆解
js
/**
*
* @param pos 当前帧位置信息 vector3
* @param currentFrameConfig 当前帧自车位置信息
* @param targetFrameConfig 目标帧自车位置信息
*/
export function positionMappingV2(
pos: THREE.Vector3 | THREE.Vector3[],
currentFrameConfig: PositionInfoType,
targetFrameConfig: PositionInfoType,
) {
if (!pos || !currentFrameConfig || !targetFrameConfig) return false;
pos = Array.isArray(pos) ? pos : [pos];
let {
yaw: c_yaw,
pitch: c_pitch,
roll: c_roll,
x: c_x,
y: c_y,
z: c_z
} = currentFrameConfig.position;
//角度转弧度
// c_yaw = c_yaw > 270 ? 450 - c_yaw : 90 - c_yaw;
c_yaw = (c_yaw * Math.PI) / 180;
c_yaw = Math.PI / 2 - c_yaw;
c_pitch = -(c_pitch * Math.PI) / 180;
c_roll = (c_roll * Math.PI) / 180;
let c_pos = new THREE.Vector3(c_x, c_y, c_z);
//当前帧到指北坐标系的矩阵
const dir = 'ZYX';
let c_quaternion = new THREE.Quaternion();
c_quaternion.setFromEuler(new THREE.Euler(c_roll, c_pitch, c_yaw, dir));
// c_quaternion.setFromEuler(new THREE.Euler(0, 0, c_yaw, 'ZYX'));
let {
yaw: t_yaw,
pitch: t_pitch,
roll: t_roll,
x: t_x,
y: t_y,
z: t_z
} = targetFrameConfig.position;
//目标帧的角度转弧度
// t_yaw = t_yaw > 270 ? 450 - t_yaw : 90 - t_yaw;
t_yaw = (t_yaw * Math.PI) / 180;
t_yaw = Math.PI / 2 - t_yaw;
t_pitch = -(t_pitch * Math.PI) / 180;
t_roll = (t_roll * Math.PI) / 180;
let t_pos = new THREE.Vector3(t_x, t_y, t_z);
//目标帧到指北角的矩阵
let t_quaternion = new THREE.Quaternion();
t_quaternion.setFromEuler(new THREE.Euler(t_roll, t_pitch, t_yaw, dir));
let t_quaternion_inverted = t_quaternion.invert();
let c_matrix4 = new THREE.Matrix4();
c_matrix4.setPosition(c_pos);
let t_matrix4 = new THREE.Matrix4();
t_matrix4.setPosition(t_pos).invert();
let c_lidar2car = new THREE.Matrix4().fromArray(currentFrameConfig.lidar2car.flat()).transpose();
let t_lidar2car_i = c_lidar2car.clone().invert();
const gnss2lidarArr = [
[
-0.026109514521249981,
0.99965286595866976,
-0.0036201203852738446,
-0.047121363808201665
],
[
-0.99957277620278817,
-0.026059425187690454,
0.013241260141465558,
-0.037917682102624306
],
[
0.013142390807446535,
0.0039642986731841176,
0.99990538314506994,
-0.16919957365882846
],
[
0,
0,
0,
1
]
];
let gnss2lidar = new THREE.Matrix4().fromArray(gnss2lidarArr.flat()).transpose();
let gnss2lidar_i = gnss2lidar.clone().invert();
const gnss2car = new THREE.Matrix4().multiplyMatrices(c_lidar2car, gnss2lidar);
const gnss2car_i = gnss2car.clone().invert();
console.log({ gnss2car})
return pos.map((p) => {
const newPos = p.clone()
// 局部坐标转全局坐标
.applyMatrix4(t_lidar2car_i.clone())
.applyMatrix4(gnss2lidar_i.clone())
.applyQuaternion(c_quaternion.clone())
.applyMatrix4(c_matrix4.clone())
// 全局坐标转局部坐标
.applyMatrix4(t_matrix4.clone())
.applyQuaternion(t_quaternion_inverted.clone())
.applyMatrix4(gnss2lidar.clone())
.applyMatrix4(c_lidar2car.clone());
return newPos;
});
}算法三:LLA -> ECEF -> ENU(该方法暂时没跑通)
js
import * as THREE from 'three';
import proj4 from 'proj4 ';
import { PositionInfoType } from '../type';
/**
*
* @param pos 当前帧位置信息 vector3
* @param currentFrameConfig 当前帧自车位置信息
* @param targetFrameConfig 目标帧自车位置信息
*/
export function positionMapping(
pos: THREE.Vector3 | THREE.Vector3[],
currentFrameConfig: PositionInfoType,
targetFrameConfig: PositionInfoType,
) {
if (!pos || !currentFrameConfig || !targetFrameConfig) return false;
pos = Array.isArray(pos) ? pos : [pos];
const utmProj = "+proj=utm +zone=49 +datum=WGS84 +units=m +no_defs";
const wgs84 = "+proj=longlat +datum=WGS84 +no_defs";
function llaToECEF(lat: number, lon: number, h: number) {
const a = 6378137.0; // WGS84椭球的长半轴 (米)
const e2 = 0.00669437999014; // WGS84椭球的偏心率的平方
const N = a / Math.sqrt(1 - e2 * Math.sin(lat) * Math.sin(lat));
const x = (N + h) * Math.cos(lat) * Math.cos(lon);
const y = (N + h) * Math.cos(lat) * Math.sin(lon);
const z = ((1 - e2) * N + h) * Math.sin(lat);
return { x, y, z };
}
function ecefToENU(lat0: number, lon0: number, h0: number, lat: number, lon: number, h: number) {
// 参考点的ECEF坐标
const ecef0 = llaToECEF(lat0, lon0, h0);
const ecef = llaToECEF(lat, lon, h);
const dx = ecef.x - ecef0.x;
const dy = ecef.y - ecef0.y;
const dz = ecef.z - ecef0.z;
// 计算参考点的ECEF坐标系的旋转矩阵
const sinLat0 = Math.sin(lat0);
const cosLat0 = Math.cos(lat0);
const sinLon0 = Math.sin(lon0);
const cosLon0 = Math.cos(lon0);
// ENU坐标
const e = -sinLon0 * dx + cosLon0 * dy;
const n = -sinLat0 * cosLon0 * dx - sinLat0 * sinLon0 * dy + cosLat0 * dz;
const u = cosLat0 * cosLon0 * dx + cosLat0 * sinLon0 * dy + sinLat0 * dz;
return new THREE.Vector4( e, n, u, 1 );
}
function calTrans(c_x: number, c_y: number, c_z: number, t_x: number, t_y: number, t_z: number) {
// 转换为经纬度
const [c_lon, c_lat] = proj4(utmProj, wgs84, [c_x, c_y]);
const [t_lon, t_lat] = proj4(utmProj, wgs84, [t_x, t_y]);
console.log({c_lon, c_lat, t_lon, t_lat});
const c_lat_r = THREE.MathUtils.degToRad(c_lat);
const c_lon_r = THREE.MathUtils.degToRad(c_lon);
const t_lat_r = THREE.MathUtils.degToRad(t_lat);
const t_lon_r = THREE.MathUtils.degToRad(t_lon);
return ecefToENU(c_lat_r, c_lon_r, c_z, t_lat_r, t_lon_r, t_z);
}
// Create transformation matrices for A and B
let {
yaw: c_yaw,
pitch: c_pitch,
roll: c_roll,
x: c_x,
y: c_y,
z: c_z
} = currentFrameConfig.position;
let {
yaw: t_yaw,
pitch: t_pitch,
roll: t_roll,
x: t_x,
y: t_y,
z: t_z
} = targetFrameConfig.position;
const gnss2lidarArr = [
[
-0.026109514521249981,
0.99965286595866976,
-0.0036201203852738446,
-0.047121363808201665
],
[
-0.99957277620278817,
-0.026059425187690454,
0.013241260141465558,
-0.037917682102624306
],
[
0.013142390807446535,
0.0039642986731841176,
0.99990538314506994,
-0.16919957365882846
],
[
0,
0,
0,
1
]
];
let c_lidar2car = new THREE.Matrix4().fromArray(currentFrameConfig.lidar2car.flat()).transpose();
let t_lidar2car_i = c_lidar2car.clone().invert();
let gnss2lidar = new THREE.Matrix4().fromArray(gnss2lidarArr.flat()).transpose();
let gnss2lidar_i = gnss2lidar.clone().invert();
const gnss2car = new THREE.Matrix4().multiplyMatrices(c_lidar2car, gnss2lidar);
const gnss2car_i = gnss2car.clone().invert();
console.log({ gnss2car})
const pose1 = new THREE.Vector3(c_x, c_y, c_z).clone().applyMatrix4(gnss2car_i);
const pose2 = new THREE.Vector3(t_x, t_y, t_z).clone().applyMatrix4(gnss2car_i);
const trans = calTrans(pose1.x, pose1.y, pose1.z, pose2.x, pose2.y, pose2.z)
return pos.map((p) => {
const newPos = p.clone().sub(trans);
return newPos;
});
}